|
Torna all'indice di Tecnica & Medicina
|
 |
|


|
187. Gradient Factors: come capirli e sceglierli di Yme Carsana (International Training Director e International Technical Trainer Director SSI, Istruttore CCR Poseidon e rEvo e Istruttore SSI Tech) Mentre sto svolgendo gli ultimi controlli al mio rebreather prima di salire a bordo, ascolto distrattamente una discussione sui Gradien Factors alle mie spalle: “Quali impostazioni mi suggerisci?” “Dipende da come ti senti.” “Scusa? Puoi spiegarmi meglio?” “Le impostazioni dei gradient factors dipendono dal subacqueo: con l’esperienza imparerai a sentire quali sono quelli giusti per te!” Un alone di mistero aleggia quando si parla dell’impostazione dei Gradient Factors sul computer e se è vero che la regolazione può variare con l’esperienza, qui descriverò come funzionano e quali potrebbero essere i passi iniziali sapendo già di ricevere critiche anche solo per aver suggerito impostazioni diverse da quelle ritenute più corrette da altri. Mi prenderò questo rischio rincuorato dal fatto che, spero molti, potranno capire meglio questo sistema di regolazione della sicurezza nella pianificazione di un’immersione con un software decompressivo che si basa sull’algoritmo Bhulmann. Un po’ di storia sulla teoria della decompressione Già molti anni fa, in occasione della costruzione dei piloni dei ponti, si era capito che i lavoratori pressurizzati nei cassoni stagni, avevano problemi se riportati in superficie da determinate profondità. Camminavano piegati dal dolore (in inglese ”bent”) e gli esiti potevano essere anche fatali.
Haldane |
|
 |
Ciò
significa che se un tessuto viene identificato come
“tessuto da 10 minuti”, esso si saturerà al 50% dopo
10 min, di un altro 25% dopo altri 10 min, di un altro
12,5% dopo altri 10 min, di un altro 6,25% dopo altri 10
min, di un altro 3,125% dopo altri 10 min e di un altro
1,56% dopo altri 10 min. In base a questo ragionamento, Haldane costruì un modello matematico considerando 5 tessuti da 5, 10, 20, 40, 70 minuti di emitempo. Come detto, è necessario considerare più tessuti perché nel nostro corpo, essi differiscono per una diversa vascolarizzazione e, di conseguenza, velocità di saturazione e desaturazione. I tessuti “veloci” sono quelli molto perfusi (con molto sangue) come gli organi vitali, il cervello, il sangue stesso, etc. Essi avranno emitempi di 5 o 10 minuti. Quelli più lenti, con meno sangue, sono le ossa, le cartilagini, etc., e avranno emitempi più lunghi quindi, si satureranno e desatureranno più lentamente. |
|
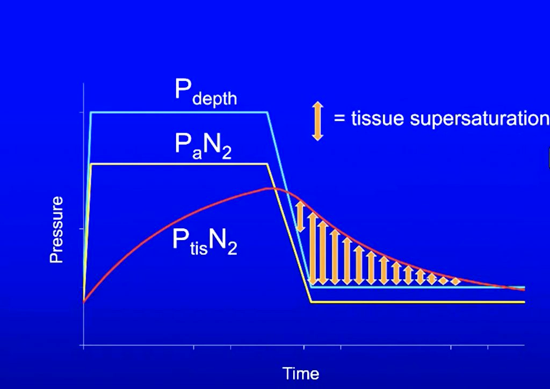
Il concetto di sovrasaturazione Risalendo da una determinata quota, i tessuti inizieranno a scaricarsidell’azoto, ma per eguagliare la pressione ambientale dell’azoto respirato alla nuova quota, necessiteranno di un certo periodo. Durante questo periodo saranno in una condizione di “sovrasaturazione” rispetto alla pressione ambientale dell’azoto inspirato. Questa sovrasaturazione non deve eccedere di 1,58 volte la pressione dell’azoto negli alveoli polmonari (che sarà nel caso dell’aria 0,79 moltiplicato per la pressione assoluta), perché superando questo limite si può incorrere in una patologia da decompressione (PDD). |
|
|
Nella
figura sopra si nota una linea blu che indica l’aumento
della pressione scendendo in profondità, che si
stabilizza una volta giunti sul fondo. La linea gialla
indica l’aumento della pressione parziale dell’azoto
(PPN2) inspirato durante la discesa:
anch’essa si stabilizza raggiungendo il fondo. La linea
rossa indica un tessuto che inizia a saturarsi, ma non
raggiunge la saturazione completa (altrimenti
toccherebbe la linea gialla nella fase piatta, cioè
quella di fondo). |
|
|
Workman
L’americano
Robert Workman, in tempi ben più recenti (1956), ebbe la
possibilità di semplificare la comprensione del sistema
di calcolo della decompressione introducendo il concetto
del “valore M” che indica il valore di
sovrasaturazione massima che un tessuto può tollerare
per non incorrere in una PDD. Furono anche introdotti
più compartimenti per adattarsi meglio alle
caratteristiche fisiologiche umane e il rapporto massimo
di sovrasaturazione fu stabilito in 1:1,58 come detto
sopra. |
|
|
Come descritto prima, la velocità di scarico dei
tessuti in risalita necessita di tempo, perciò se il mio
corpo che contiene il tessuto con emitempo 5 minuti
saturo dopo 30 minuti d’immersione, risale di 10 metri
si crea una sovrasaturazione perchè il
subacqueo è risalito in un minuto, ma il tessuto ha
bisogno di ben più di un minuto per equilibrarsi con la
nuova pressione ambiente dell’inerte. Come già detto
questo eccesso di saturazione non può essere più di 1,58
volte superiore a quello ambiente. Si può quindi
tracciare una seconda linea sul grafico che indica il
“Valore M” che non può essere oltrepassato
dal quel tessuto per non superare il “valore massimo”
(valore M) di sovrasaturazione. Nel momento in cui il tessuto tocca il valore massimo (la linea dei valori M) il computer genera una sosta di decompressione (indicata con il punto 1) dando al tessuto il tempo di scaricarsi un po’ prima di poter continuare la risalita. Ripresa la risalita dopo la tappa di decompressione può darsi che la sovrasaturazione di quel tessuto tocchi nuovamente la linea dei valori M, e allora il computer genererà un’altra tappa di decompressione fino a quando il subacqueo potrà uscire sano e salvo dall’acqua. Workman aggiunse al suo modello nuovi tessuti per migliorare l’algoritmo sopratutto nella porzione dei tessuti medi che sono i più stressati dagli obblighi decompressivi. |
|

 |
Modello a 16 compartimenti Per complicare le cose bisogna considerare che ogni diverso tessuto inserito nel computer ha una sua specifica linea dei valori M. In pratica nel nostro computer potremmo avere ben 16 compartimenti con 16 linee di valori M diverse. Questo perchè, in effetti, i tessuti veloci sopportano una sovrasaturazione maggiore rispetto a quelli lenti. Se abbiamo un computer tecnico, che gestisce anche le miscele contenenti elio, esso avrà ulteriori 16 tessuti ognuno con i valori M specifici per quel tessuto, considerando anche l’elio come gas inerte presente nei tessuti. Per fortuna che abbiamo un computer al polso o un software decompressivo che calcola tutto per noi! Bhulmann Lo svizzero Albert Bhulmann (1923-1994), ricercatore universitario di Zurigo, adattò l’algoritmo di Workman rendendolo più conservativo (cioè modificando le linee dei valori M) e aggiungendo compartimenti arrivando ad inserirne 16 come detto sopra. Il suo modello decompressivo è stato cambiato più volte fino ad adattarlo il meglio possibile alla fisiologia umana. Bhulmann ha avuto la fortuna di poter lavorare con un’enorme quantità di dati inviatigli da subacquei ricreativi, tecnici e commerciali ed è per questa ragione che il suo modello è quello più sperimentato. |
|
Altri modelli decompressivi
Il
VPM - Varying Permeability Model (cioè
modello a permeabilità variabile) è un algoritmo di
decompressione definito da D. E. Yount che viene usato
nella subacquea sportiva e commerciale. Il modello VPM presume che microscopici nuclei gassosi siano sempre presenti sia nel sangue che nei tessuti che lo contengono. Ogni nucleo più grande di una dimensione critica specifica, relativa alla massima profondità raggiunta, crescerà durante la decompressione (e quindi durante la risalita). Il modello ha lo scopo di minimizzare il volume totale di queste bolle mantenendo la pressione esterna dei gas inerti più alta rispetto a quella interna alla bolla. Da questo modello decompressivo ne sono derivati altri che vengono usati ancor oggi in molti computer subacquei e rappresentano il fondamento delle “ratio-deco”. Non approfondiremo questi modelli perchè il sistema che permette di aumentare la sicurezza sui computer che hanno i Gradient Factors è quello di Bhulmann, anche se c’è da dire che introduce tappe di decompressione più profonde per tenere sotto controllo la dimensione delle bolle, ed accorcia le tappe più superficiali come si può notare nel grafico riportato nella figura a destra. |
|

 |
Gradient Factors: dove si trovano Oggi i computer subacquei ci offrono sempre più funzioni per proteggerci dai pericoli della PDD aumentando il livello di conservatorismo nella gestione delle decompressioni. Mentre i computer che lavorano con l’algoritmo decompressivo VPM elaborano tali livelli prendendo in considerazione il “raggio critico della bolla”, molti dei computer subacquei che si basano su algoritmi Bhulmann applicano il sistema dei “Gradient Factors”.
|
|
Cosa sono i Gradient Factors
I
GF sono un sistema per
aumentare la sicurezza nella pianificazione di
un’immersione che permette di modificare l’inclinazione
della linea dei valori M. Il sistema è stato inventato
da Erik Baker negli anni ‘90 e tuttora è il sistema più
avanzato per la gestione della sicurezza con un computer
subacqueo.
|
|
Come funzionano i Gradient Factors
Come
possiamo vedere dal primo grafico, spostando il LGF (low
gradient factor) verso lo 0% farò in modo da generare
una tappa di decompressione prima che i miei tessuti
tocchino il valore M, aumentando così la sicurezza. L’HGF (high gradient factor) influenza essenzialmente l’ultima tappa di decompressione allungandola man mano che la sposto verso lo 0%. Ad esempio, se con un HGF 80% avrò una tappa a 3 metri di 10 minuti, portando il valore al 60% la tappa mi si potrebbe allungare a 15 minuti. Come gestire i Gradient Factors
Dopo
aver compreso come funziona il sistema a GF
dell’algoritmo Bhulmann (sugli altri modelli
decompressivi non è utilizzabile) capiamo anche perchè
oggi tale algoritmo viene preferito rispetto agli altri.
Il subacqueo può, infatti, variare i valori dei GF in
modo da creare un profilo decompressivo che segue la
filosofia decompressiva VPM (risalita con tappe più
fonde, ma meno tempo nell’ultima tappa), oppure la
filosofia “Bhulmaniana” (meno tappe fonde e più tempo
nelle tappe superficiali). |
|
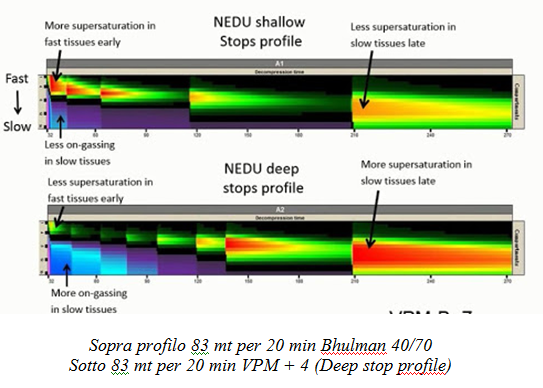
Suggerimenti sui Gradient Factors Il LGF non sempre aumenta la sicurezza. Generando tappe troppo fonde, infatti, si rallenterà la risalita, ma i tessuti lenti non ancora saturi continueranno ad assorbire gas inerte con un risultato finale di aumentare il pericolo di PDD piuttosto che aumentare la sicurezza. Nell’immagine qui di fianco sono visualizzati due profili d’immersione a 83 metri per 20 minuti con le stesse miscele ma con i due diversi algoritmi: Bhulmann 40/70 e VPM+4. Sul lato sinistro del grafico sono riportati i tessuti dai veloci (in alto) a quelli lenti (in basso). Si nota che se all’inizio della risalita si nota un minore stress infiammatorio nei tessuti veloci già saturi, quelli lenti invece continuano a saturarsi durante le tappe fonde generate dal modello VPM facendo uscire dall’acqua il subacqueo con un livello di infiammazione maggiore. |
|
|
Personalmente
(e non pretendo di avere ragione!) seguo questa regola:
imposto un LGF sul software decompressivo in modo che
non generi tappe più fonde del punto in cui prenderò il
mio primo gas decompressivo (e quindi della sua MOD). Il
computer tecnico nel quale ho inserito le mie miscele,
creerà da solo tappe fonde se lo ritiene necessario a
seconda della miscela inserita, per evitare una risalita
troppo veloce considerando che l’elio esce dai tessuti
molto più velocemente rispetto all’azoto. Essere conservativi allungando l’ultima tappa, deve comunque prendere in considerazione i valori di intossicazione ed esposizione da ossigeno (CNS %), soprattutto se questa tappa viene fatta respirando ossigeno puro, dato che risulterebbe allungata. Conclusioni
L’impostazione
dei GF può cambiare notevolmente il profilo
decompressivo, e non sempre migliorandolo. Potrebbe
essere pericoloso cambiare i GF senza capirne le
conseguenze ed il meccanismo. |
|